Follow our progress as we document our journey from concept to completion.
Week 2011. May 2026
Sprint 12
More documentation and delivery of the final report
The focus of this sprint, which was the last sprint, was to ensure that the
documentation was complete and that the final report was ready for delivery.
The final report was delivered on time in good conscience,
and the group is proud of the work that has been done throughout the project.
Week 1904. May 2026
Sprint 11
Documentation and testing
The goal of this sprint was to document the progress made and test the functionality of the integrated system.
The PCB parts arrived and was soldered together while the hinges for the Stewart platform
was tested and redisgned.
Week 1827. April 2026
Sprint 10
Calibration work
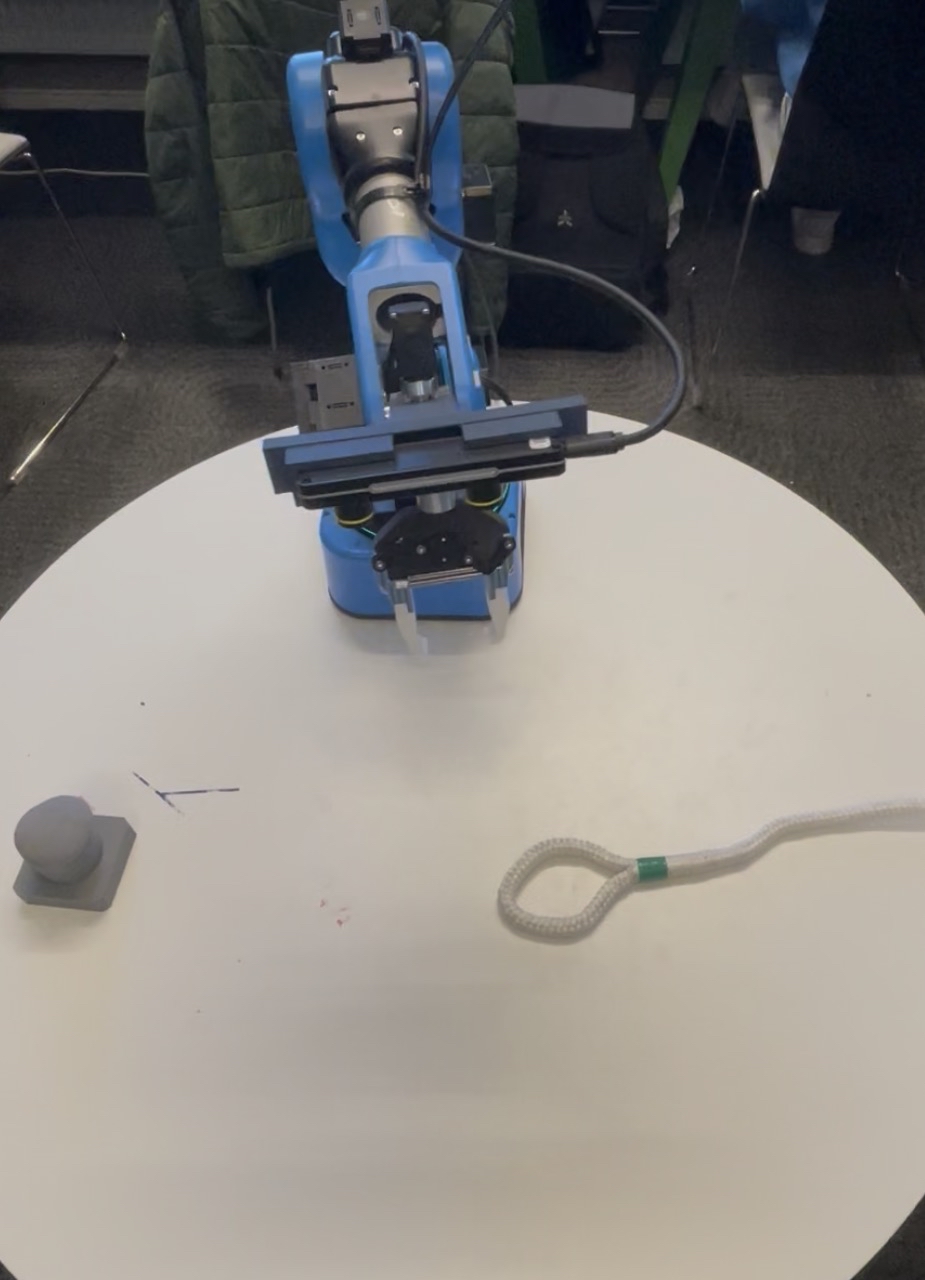
The adjustments needed to make the robot arm correctly pick up the rope loop was fixed by
ensuring the stereo camera sat flat on the surface and not tilted which it initially did,
solving the issue of constant offset between coordinates received and the actual position of the rope loop.
The PCB parts were ordered while universal hinges and legs were designed and 3D-printed for the stewart platform.
Week 1720. April 2026
Sprint 9
Status of the MVP
This sprint focus was to fix the integration challenges of the robot arm and the stereo camera, while the issue
was solved, there were still important adjustments needed to make the robot arm correctly pick up the rope loop.
The PCB and schematics was ready but needed some adjustments
and was waiting on a revision from a PCB expert from KDA before the parts would be ordered. New iterations
of the camera mount was made for the ZED M camera, while also new grippers for the robot arm was made
for better grip of the rope loop.
Week 1613. April 2026
Sprint 8
Preparation for the integration
While the MVP was slowly coming together, the focus of this sprint was to make sure that all
subsystems of the MVP was ready for integration, upon integrating the different subsystems the
computer engineering guys found issues with the robot arm and the stereo camera not wanting to work together,
making the MVP not ready for its due. The PCB (Printed Circuit Board) was closing on finishing,
while the stewart platform parts was slowly coming together.
Week 1506. April 2026
Sprint 7
Preparing for MVP (Minimum Viable Product)
Sprint 7 marks the start of shorter sprints consisting of only one week, the focus of this sprint was to
make every subsystem of the MVP ready for integration, while the electrical guys was busy preparing
the PCB and its schematics. The mechanical guy continued on the design and prototyping of the stewart system.
Week 13-1423. Mars 2026
Sprint 6
Feedback and further development
Second presentation is done, and the group has received valuable feedback to further improve the project.
The focus of this sprint was to implement adjustments based on the feedback, as well as to continue the
development process. The second week of the sprint had more focus on team building as it was spring break,
and the group had more time to spend together outside of the project work.
Week 11-1209. Mars 2026
Sprint 5
Round 2 presentation: GO
As we barely started getting familiar with the tools and technologies,
it was already time for the second presentation. The focus of this sprint was
to prepare for the presentation, as well as to continue the development process and documenting it,
at the same time as we were preparing for exams from the the other courses that we had.
Week 9-1023. February 2026
Sprint 4
Start of development
Now that the group has started to get familiar with the tools and technologies,
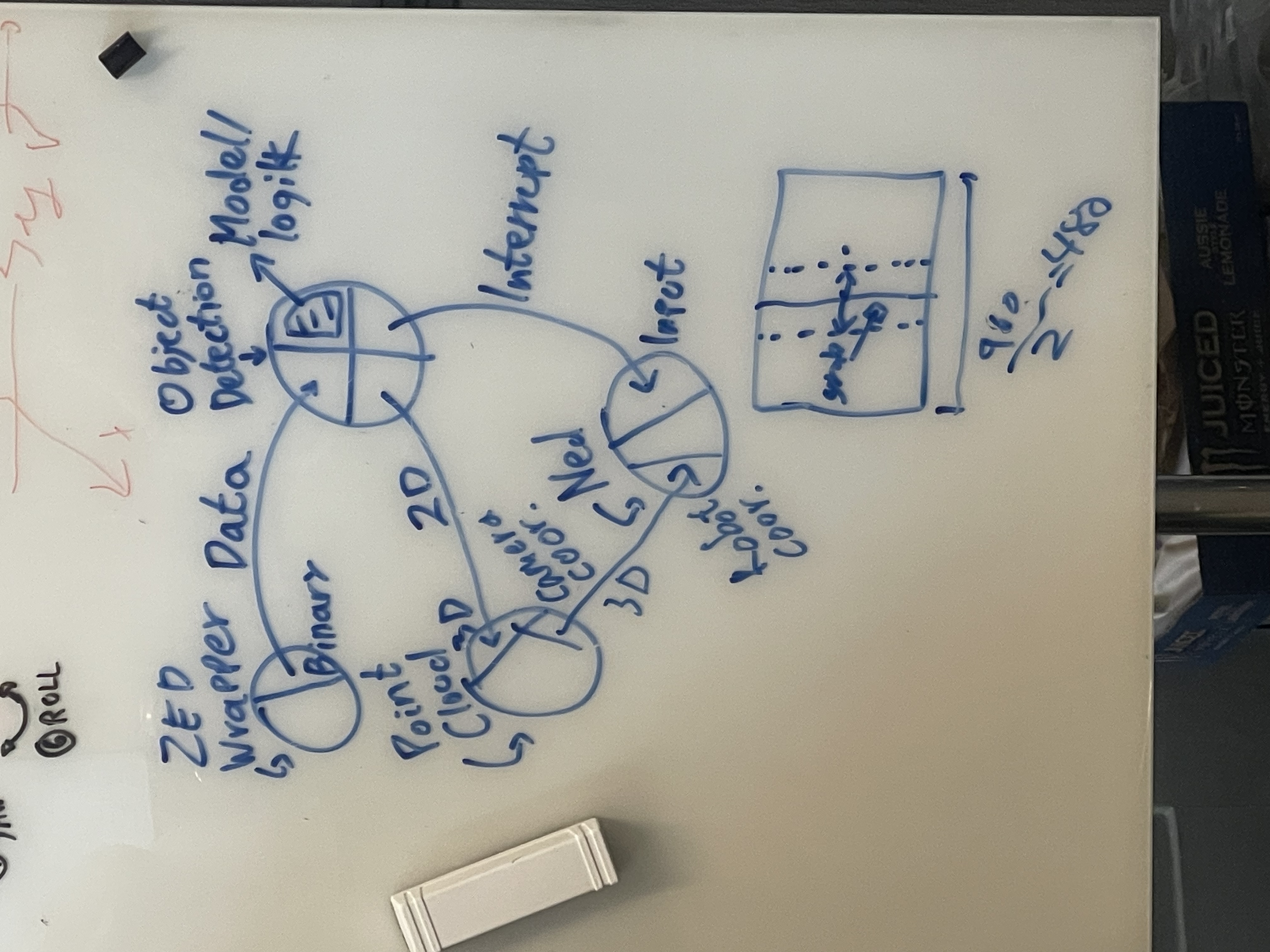
it was time to start the development process. The focus of this sprint was to
start the development of the computer vision model, as well as to start the process
of integrating the robotic arm with ROS2. The mechanical guy started with the design and
prototyping of the stewart system as well as making the ZED M camera mount.
Week 7-809. February 2026
Sprint 3
Getting familiar
First presentation was a success! The first thing done in this sprint was to discuss
and implement adjustments based on the instructive feedback.
The group has been lucky to have the tools and resources needed ready, meaning
we could get started to get familiar with the tools and technologies we will be using
to better understand the project scope and to form realistic and achievable requirements.
Week 602. February 2026
Sprint 2
Presentation 1
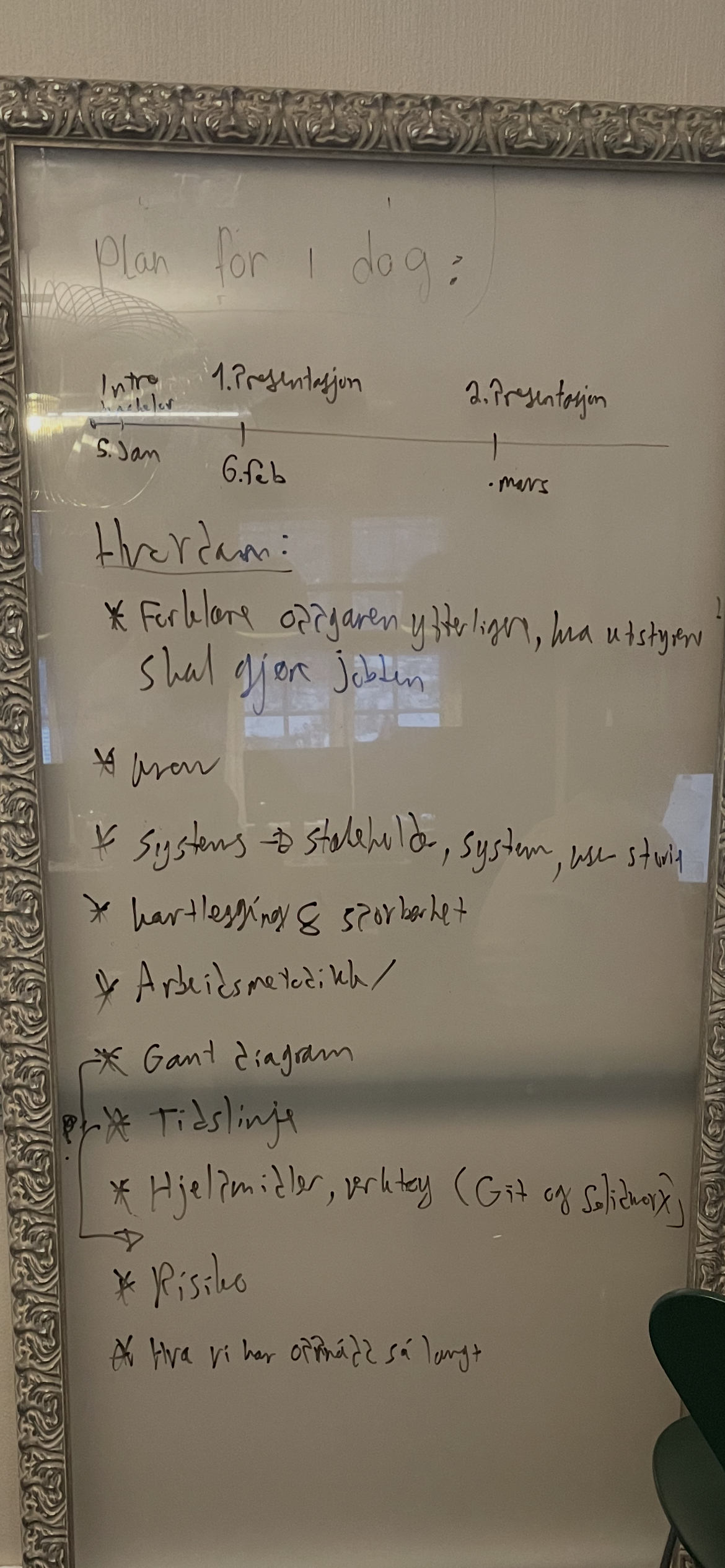
Before we knew it, the first presentation was closing up. The focus was to finnish administrative
work and to get a better understanding of the project scope and requirements, as well as
documenting our working methodology and project management approach.
Week 4-519. January 2026
Sprint 1
Project setup
A sprint with the focus of understanding the project task and defining the initial scope.
While also setting up the administratitive part of the project such as the Bitbucket repository,
project management tools and communication channels.