Computer-vision Operated
Bollard Rope Arm
Or better known as: COBRA
Background
Mooring a ship involves securing it to fixed structures using mooring lines, requiring close coordination between crew and shore personnel. The operation is physically demanding and hazardous due to heavy lines, high tension loads, and risks like snapback. Tugboats may assist larger vessels by transferring towlines through a step-by-step line-handling process. Despite being routine, mooring remains one of the most dangerous deck operations in maritime work.
Project overview
Both Kongsberg Maritime and Kongsberg Defence & Aerospace has expressed interest in the development of an automated mooring system, and have provided us with the following project description:
Development of an AI system that can identify, grip and place a rope loop from a rope on a bollard.
To achieve this the group has been tasked to use the following technologies:
- Computer vision (AI) - with the help of ZED M Stereo Camera
- Robotics - with the help of a Niryo NED2 robotic arm
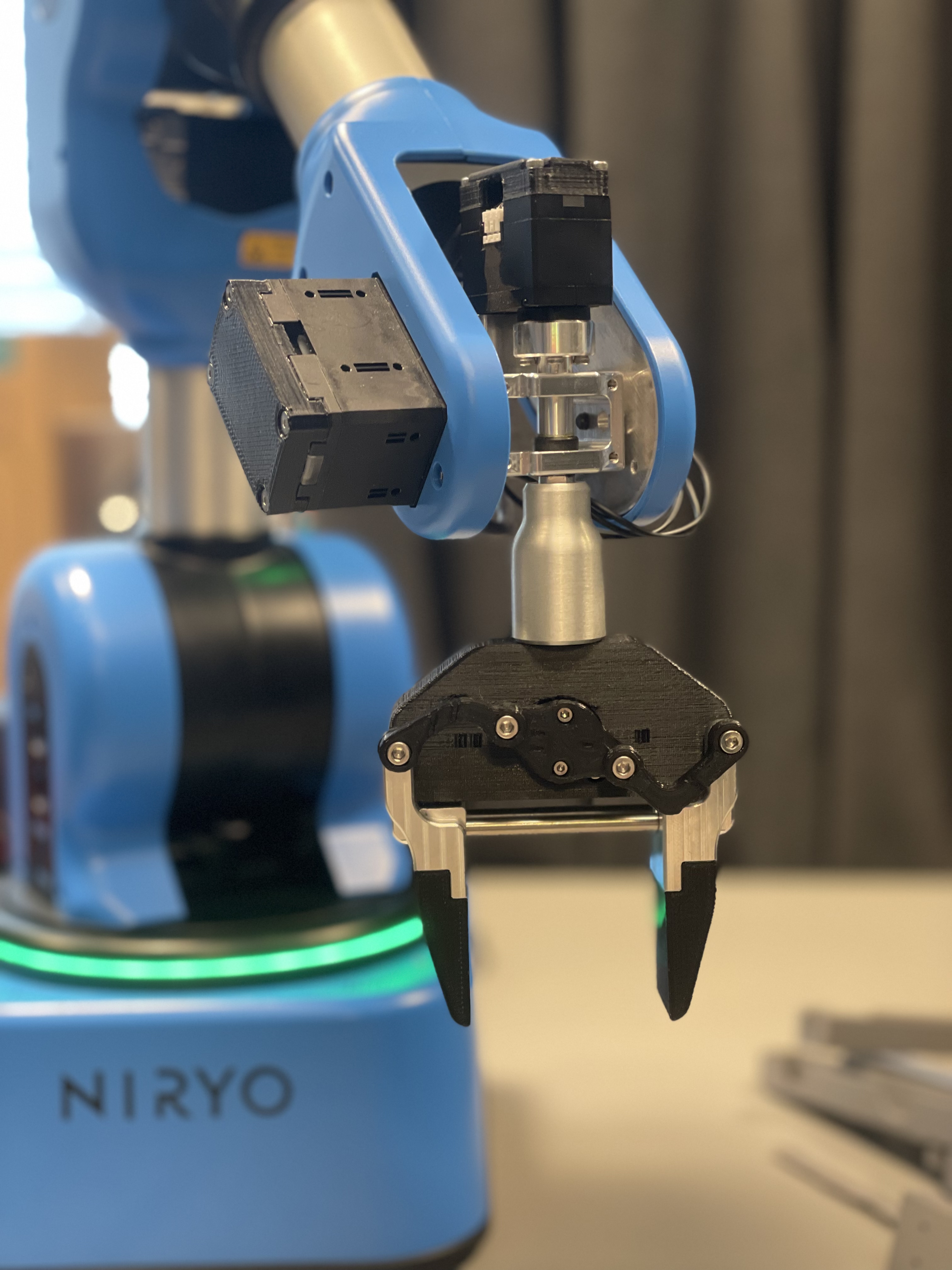


More details
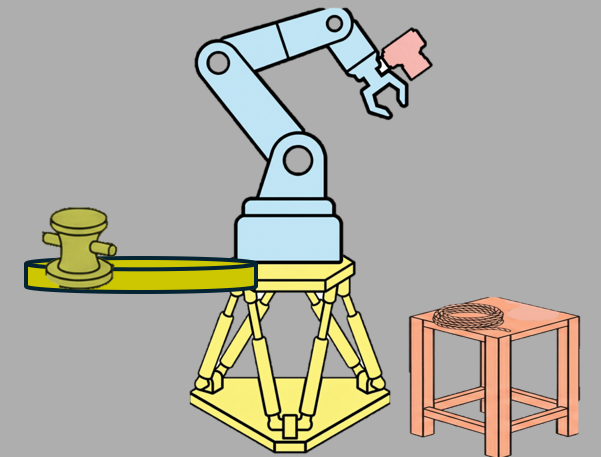
To take the project a step further, the electrical and mechanical part of the team decided to make a moving platform for the robotic arm to be placed on, to better simulate a real-life scenario of when the robot arm is placed on a tugboat where ocean waves is a factor to consider.
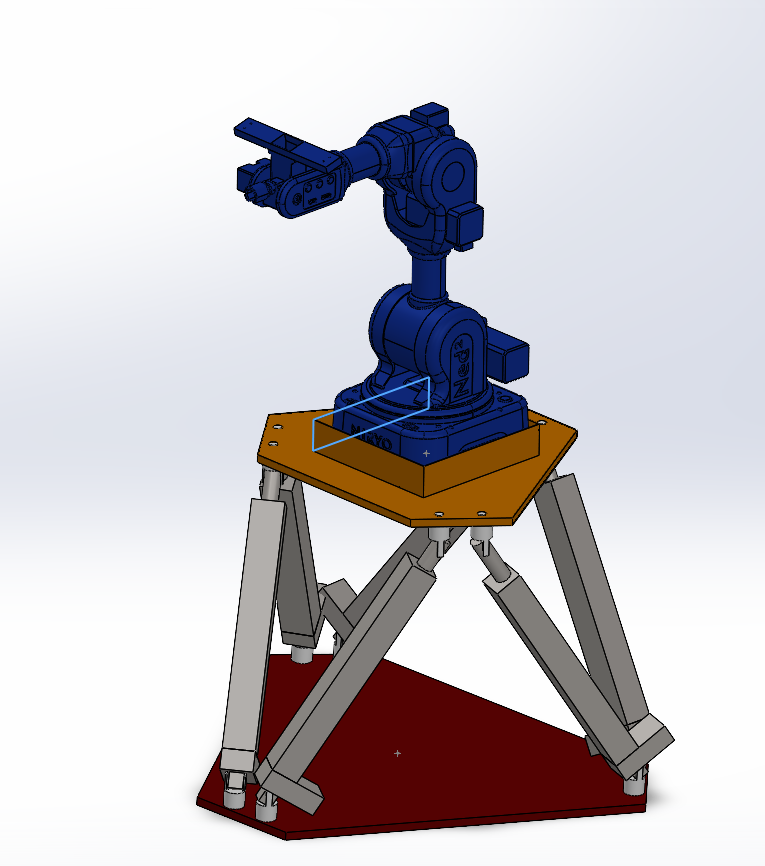
Stewart platform
A Stewart platform is a six-degree-of-freedom parallel manipulator that allows for precise control of the robotic arm's position and orientation. In our case the robot arm will be mounted on top of the platform with the bollard while the rope will be placed on a table next to it, and the platform will be programmed to simulate the movement of a tugboat on ocean waves.