
Cezar Antonio Avadanei
Software engineer student
Project manager
“to move about or wander stealthily in or as if in search of prey”

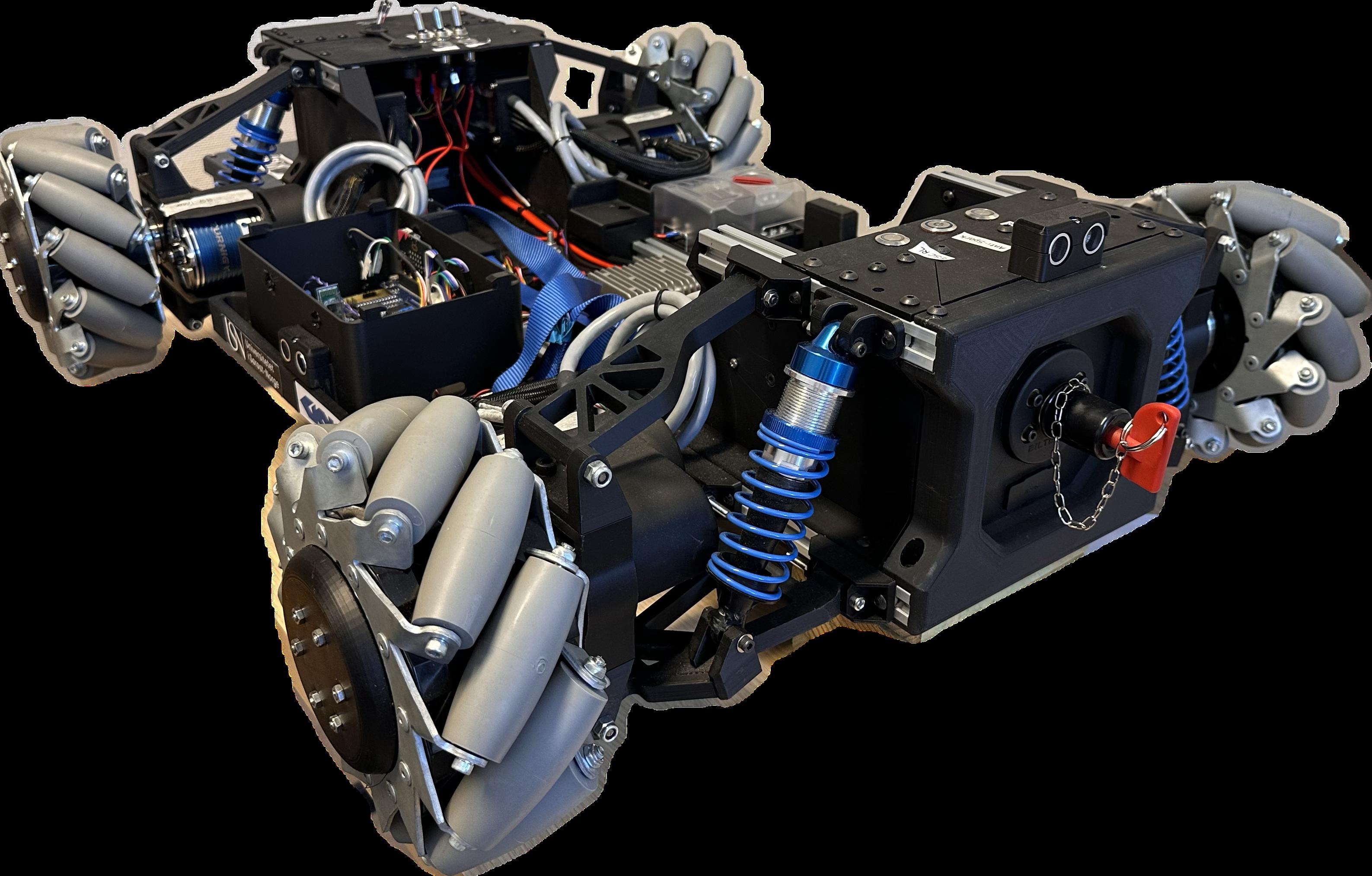
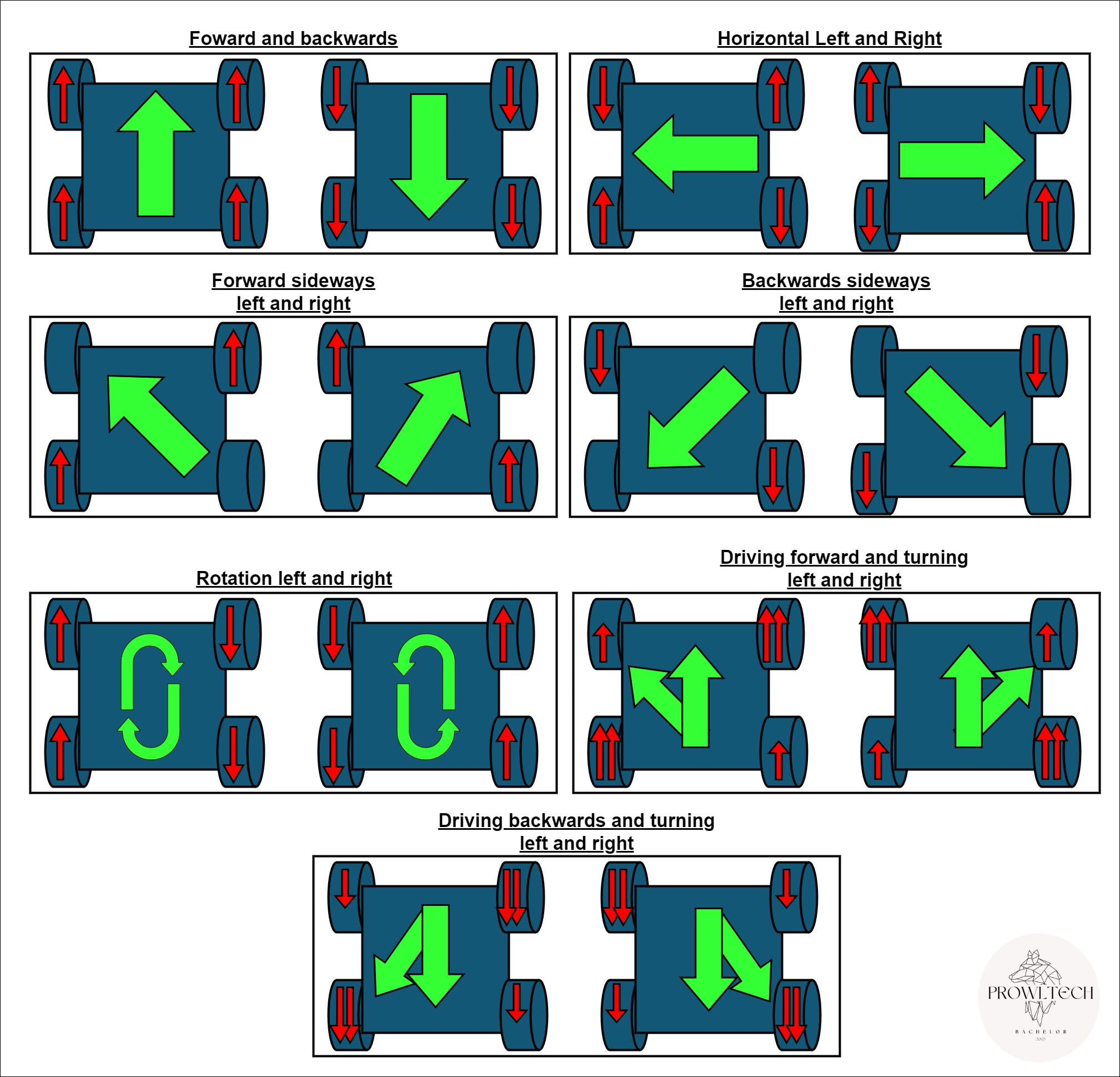
Bilen som er utviklet gjennom dette bachelorprosjektet er en mekanum-drevet, fjernstyrt/autonom bil med elektrisk drivlinje, designet for å kunne demonstrere avansert teknologi og presisjon i mobilitet. Bilen benytter et system med fire motorer som driver de fire mekanumhjulene, noe som gir bilen muligheten til å bevege seg i alle retninger uten å endre retning. Dette gir et stort potensial for presisjonskjøring, særlig i trange rom og ved komplekse manøvrer.
USN er vår oppdragsgiver i dette prosjektet og spiller en sentral rolle i utviklingen av bilen. Electronics & Energy Solutions AS er vår samarbeidspartner og bidrar med ekspertise innen elektronikk og energisystemer. Sammen jobber vi for å skape en avansert og funksjonell bil med innovative løsninger innen data, maskin og elektro.
Videreutviklingen av bilen innebærer forbedringer innen dataområdet. Bevegelsesfunksjonaliteten skal tillate kjøring i alle retninger, og hastighetskontrollen skal forbedres ned til 5 mm/s. Et GUI festet til bilen skal vise batteri- og ladestatus, samt sanntidsposisjon via GPS. I tillegg skal et sensorsystem implementeres, og AI-basert objektgjenkjenning integreres for anti-kollisjon.
Maskindelen skal være mer presis og modulær. Drivlinjen skal være uten slark, og designet skal ha høy presisjon. 3D-printing vil benyttes der det er mulig, og rammeverket med Alu T-slot-profiler videreføres. Hjulopphenget skal være utbyttbart, og batteriet skal få en ny, stroppeløs festemetode. Demping og stabilitet forbedres for trygg kjøring.
Elektrodelen fokuserer på sikkerhet og brukervennlighet. Ladesystemet skal ha automatisk feilsikring, og ledningsnettet skal forbedres. En integrert skjerm med sikre fester og hengsler skal monteres, slik at vedlikehold blir enklere. Disse forbedringene gjør bilen mer funksjonell, sikker og forberedt for videre utvikling.
ProwlTech-teamet består av tre dataingeniørstudenter, én elektroingeniørstudent og én maskiningeniørstudent..
Software engineer student
Project manager
Electrical engineer student
Group leader
Software engineer student
HMS- and management software lead

Software engineer student
Deputy leader
Mechanical engineer student
Document management and PR manager
Målet er å videreutvikle kjøretøyets funksjoner innen data, elektro og maskin. Systemet skal legges til rette for fremtidig utvikling slik at neste gruppe kan bygge videre på en solid plattform.
Implementer bevegelsesfunksjonaliteter som tillater bilen å kjøre i alle retninger.
Utvikle funksjonalitet som gjør det mulig å senke hastigheten ned til 5 mm/s.
Design et grafisk brukergrensesnitt (GUI) som er festet til bilen.
Ladesystemet skal ha et sikkerhetssystem som bryter prosessen automatisk ved eventuelle feil.
Batteristatus og ladestatus skal vises på display på bilen.
Drivlinjen skal være uten slark mellom motor og hjul og ha høy presisjon.
Utvikle et modulært design som muliggjør fleksibel videreutvikling.
Mest mulig av komponentene skal produseres ved hjelp av 3D-printing.
Videreføre eksisterende rammeverk for stabilitet og enkel montering.
Hjulopphenget skal være enkelt å bytte for vedlikehold og oppgraderinger.
Bilens nåværende bredde skal opprettholdes.
Kontaktflaten skal være i kvadratisk fasong, som dagens løsning.
Prosjektet skal ha en fungerende 3D-modell ved prosjektslutt.
Utvikle et sensorsystem for å overvåke bilens omgivelser og tilstand.
Implementer knapper for valg av ulike hastighetsmoduser.
Forbedre ledningsnettet for å sikre effektiv strømfordeling og redusere potensielle feil.
Demping og fjæring skal være sterk nok til å holde bilen oppe.
Lage nye festemetoder til batteriet uten bruk av stropper.
Vis bilens sanntidsposisjon (GPS-data) i GUI.
Implementer kameraer og utvikle AI-basert objektgjenkjenning for anti-kollisjonssystemet.
Implementer sikkerhetsfunksjoner for knapper og brytere for å forhindre utilsiktede operasjoner.
Montere en integrert skjerm med sikre fester og et presentabelt utseende.
Hengsler skal gjøre det enkelt å få tilgang til komponentene under skjermen.