

Velkommen til vår prosjektside! Vi er en dedikert gruppe studenter fra Universitetet i Sørøst-Norge (USN), campus Kongsberg, som i våren 2024 tar fatt på vårt avsluttende semester. Her på nettsiden vil du finne informasjon om prosjektet vårt, bli bedre kjent med teamet bak arbeidet, og følge med på reisen gjennom vår blogg.
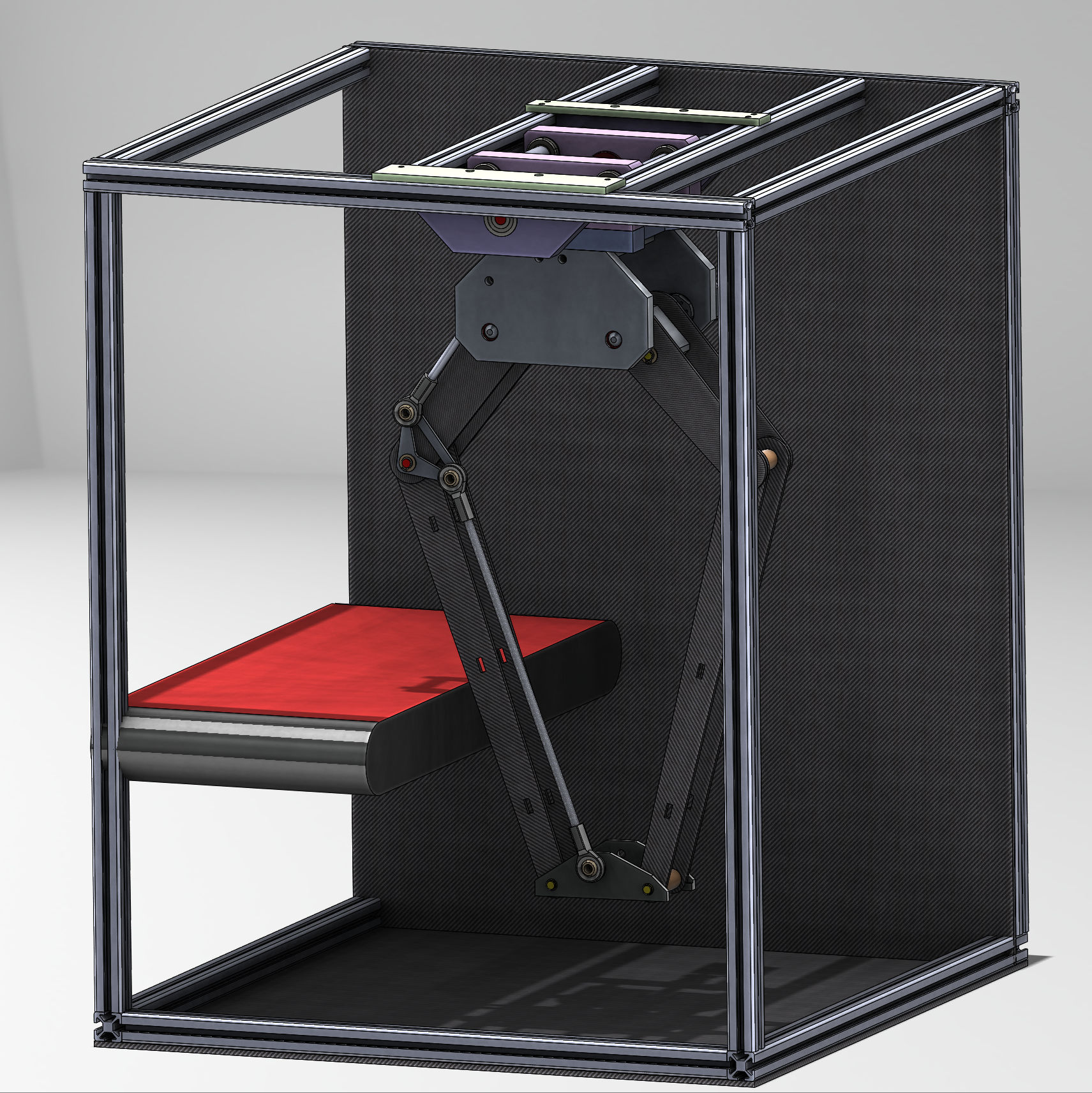
Vi skal på vegne av Tronrud Engineering utforske produksjonsmuligheter og virkemåte av «Pick and place» roboter, samt utvikle en utstillingsmodel, hvorav formålet er å gi bedriften et grunnlag for videreutvikling av slike roboter til deres maskiner. Produktet skal kun bevise enkelte deler av konseptet, men det er et krav at produktet skal lages av kompositt da bedriften ønsker å tilegne seg mer kunnskap innen området. Derfor legges det ekstra vekt på produksjonsmetoder ved bruk av kompositt med karbonfiber. I tillegg legges det også stor vekt på grundig dokumentasjon, samt minimering av kostnader. Typisk for «pick and place» maskiner er at de flytter produkter fra A til B med et henteverktøy, hvor ofte punkt A er i bevegelse.
Tronrud har alt en "pick and place" løsning, men denne er for dyr. Derfor ligger fokuset vårt på å utvikle en løsning som har samme funksjonalitet men er kosteffiktiv. Utvikling av plukke/gripemekanismen er ikke en del av oppgaven, da Tronrud allerede har denne løsningen.
En stor del av oppgaven er å skrive en rapport, den kan lastes ned her:
downloadHvem er vi
Vi er en gruppe studenter ved USN Kongsberg.

Theo Magnor
Software engineer
Leader & Software documentation
theo@magnor.as

Ask Lindbråten
Software engineer
Economy & Software architecture
asklindbraten@hotmail.com

Lorentz Tinney Rasmussen
Electronics engineer
System engineer, Electronics & Report
lorentz.tinney@gmail.com

Marte Overgaard
Mechanical engineer
Risk management & Document templates
marteovergaard94@gmail.com

Adrian Kristiansen
Mechanical engineer
Mechanical & Social media
kristiansenadrian@yahoo.no

Sophus Gjerstad
Mechanical engineer
Materials technology & Documentation
sophus.gjerstad@cadpit.com

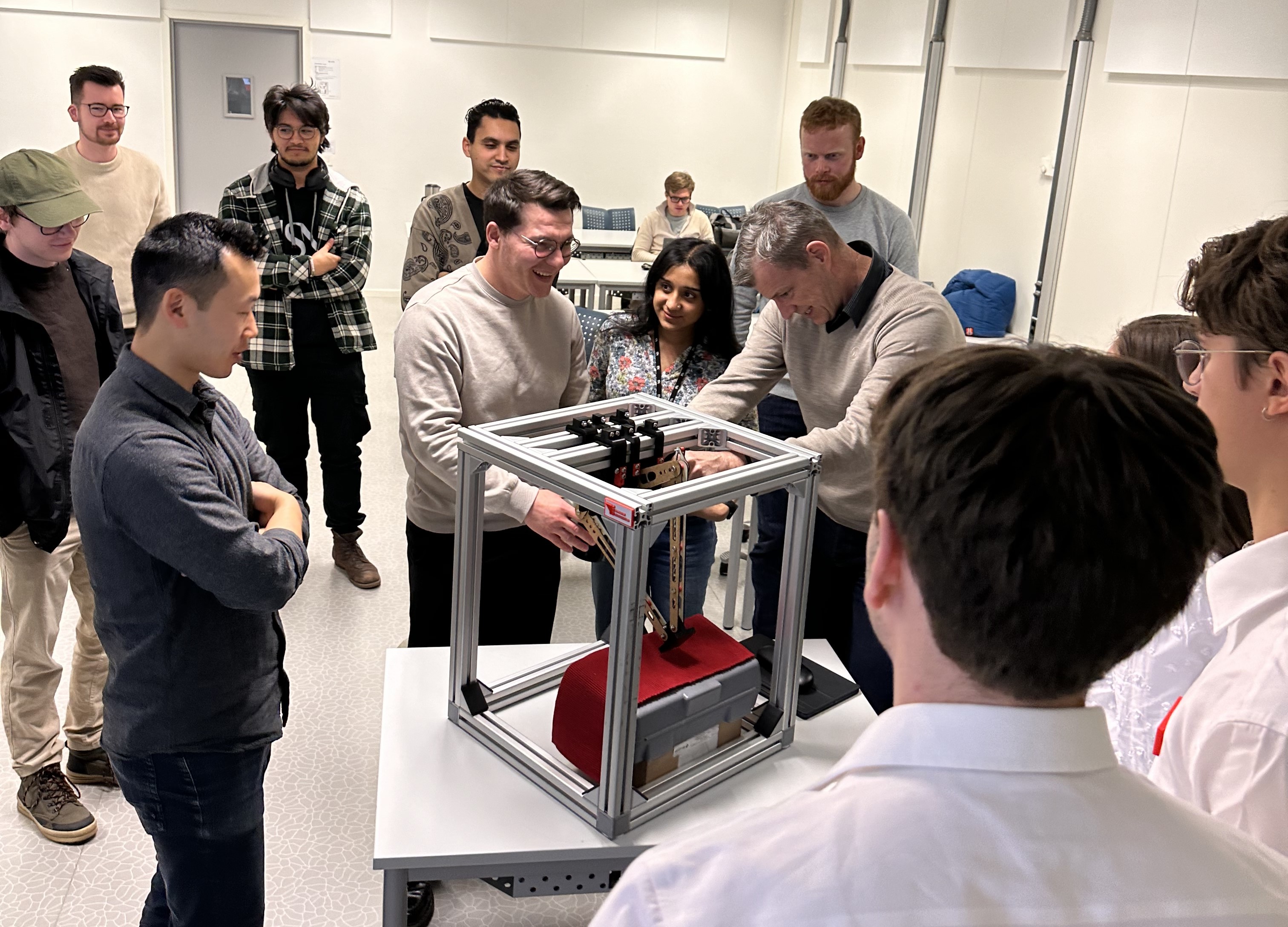
Etter noen uker med intens arbeid og dedikasjon, hadde vi gleden av å fremføre vårt prosjekt den 3. juni. Dette markerer slutten på prosjektet, og vi er fornøyd med utfallet.

Vi er glade for å meddele at rapporten nå er levert etter en intensiv periode med hardt arbeid og mange sene kvelder. Vi har lagt inn utallige timer, og selv om det har gått på bekostning av søvnen, er vi svært fornøyde med resultatet. :)
Rapporten kan lastes ned her:
download
Den siste perioden har vært hektisk med fokuset rettet mott teknisk arbeid, dokumentering og rapport skriving. Det har vært en tid for både utfordringer og triumfer, hvor hvert teammedlem har brukt sine ferdigheter for å bidra til fremdriften av prosjektet.


Da vi stod foran oppgaven med vår andre presentasjon, var det med en følelse av spenning og forventning. Dette var en anledning for oss å vise frem de fremskrittene vi har gjort, og ikke minst, planene vi har for veien videre. Det var en mulighet til å dele vår reise, fra konseptvalg til teknisk planlegging og utførelse.
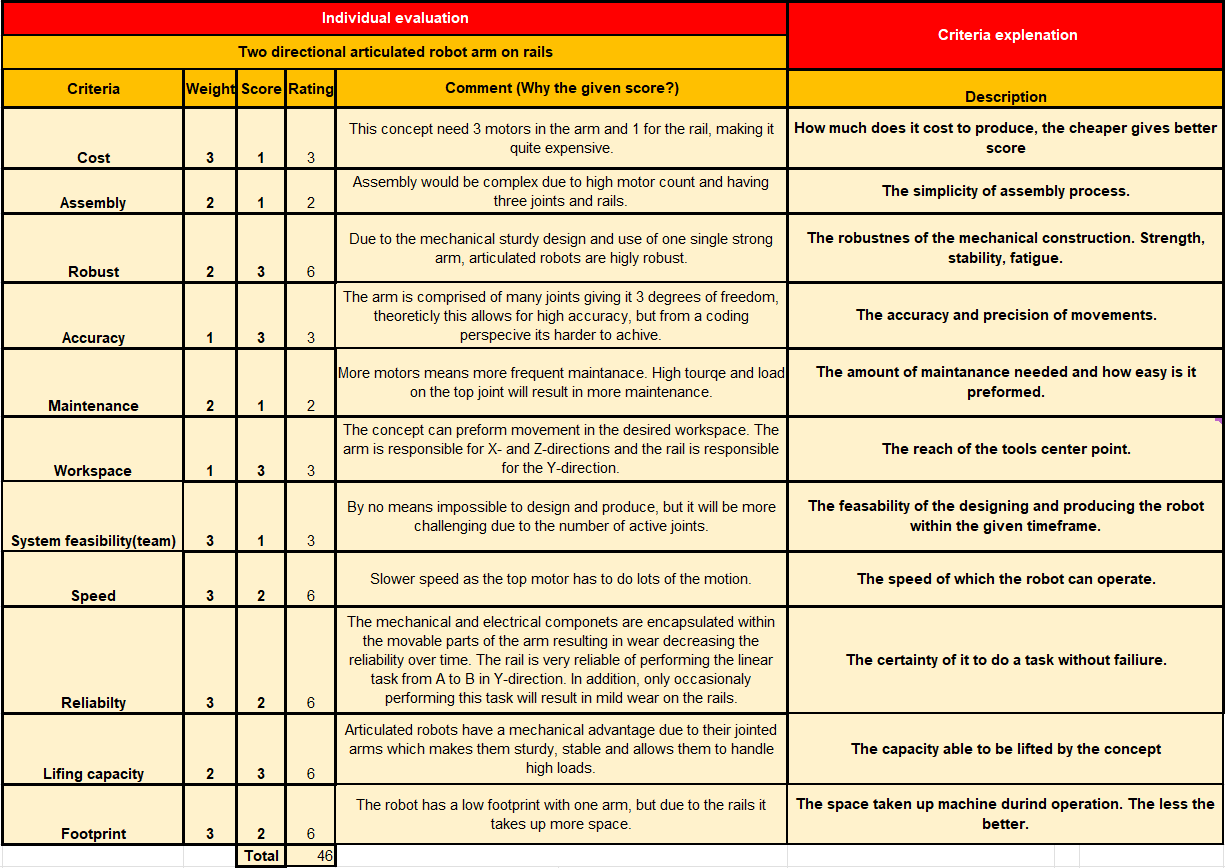
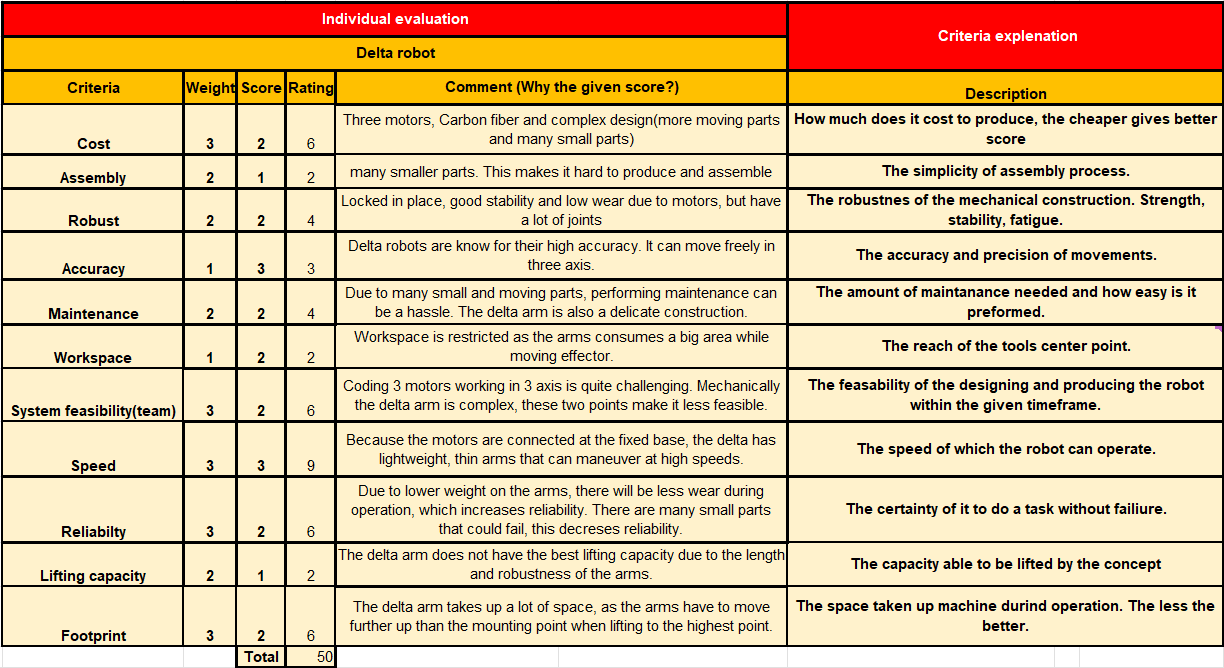
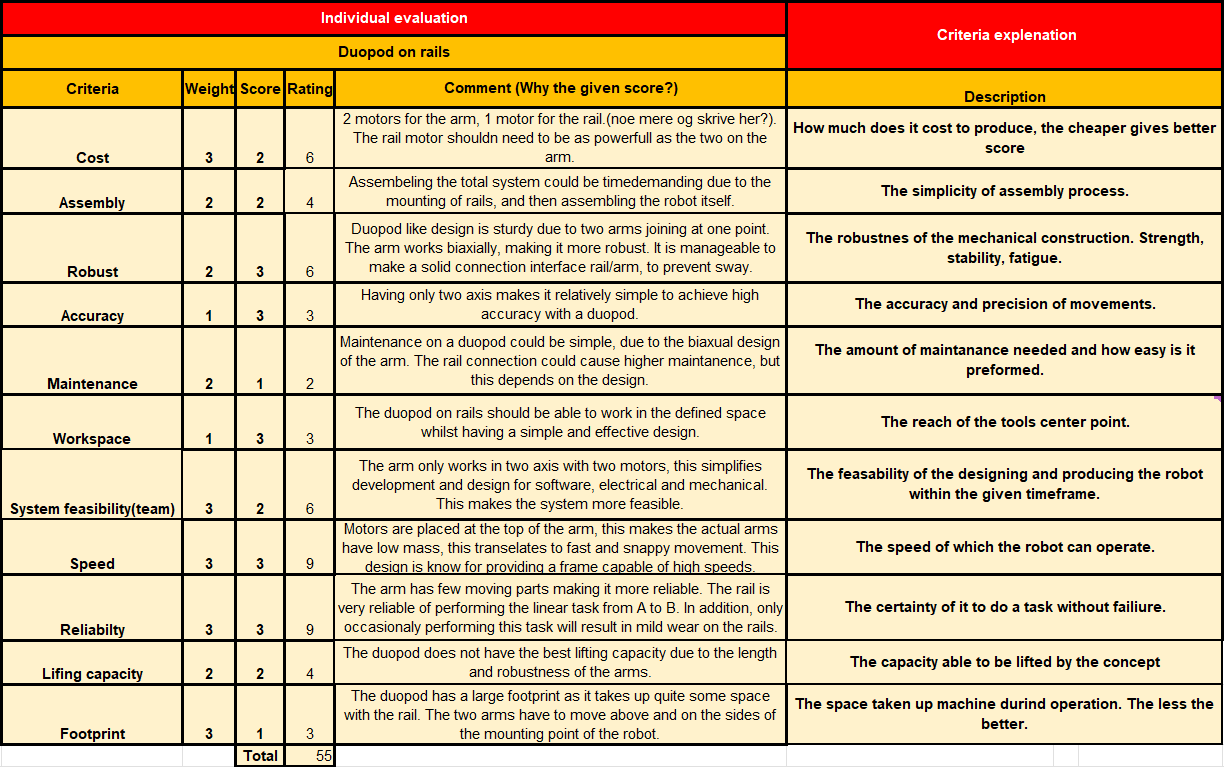
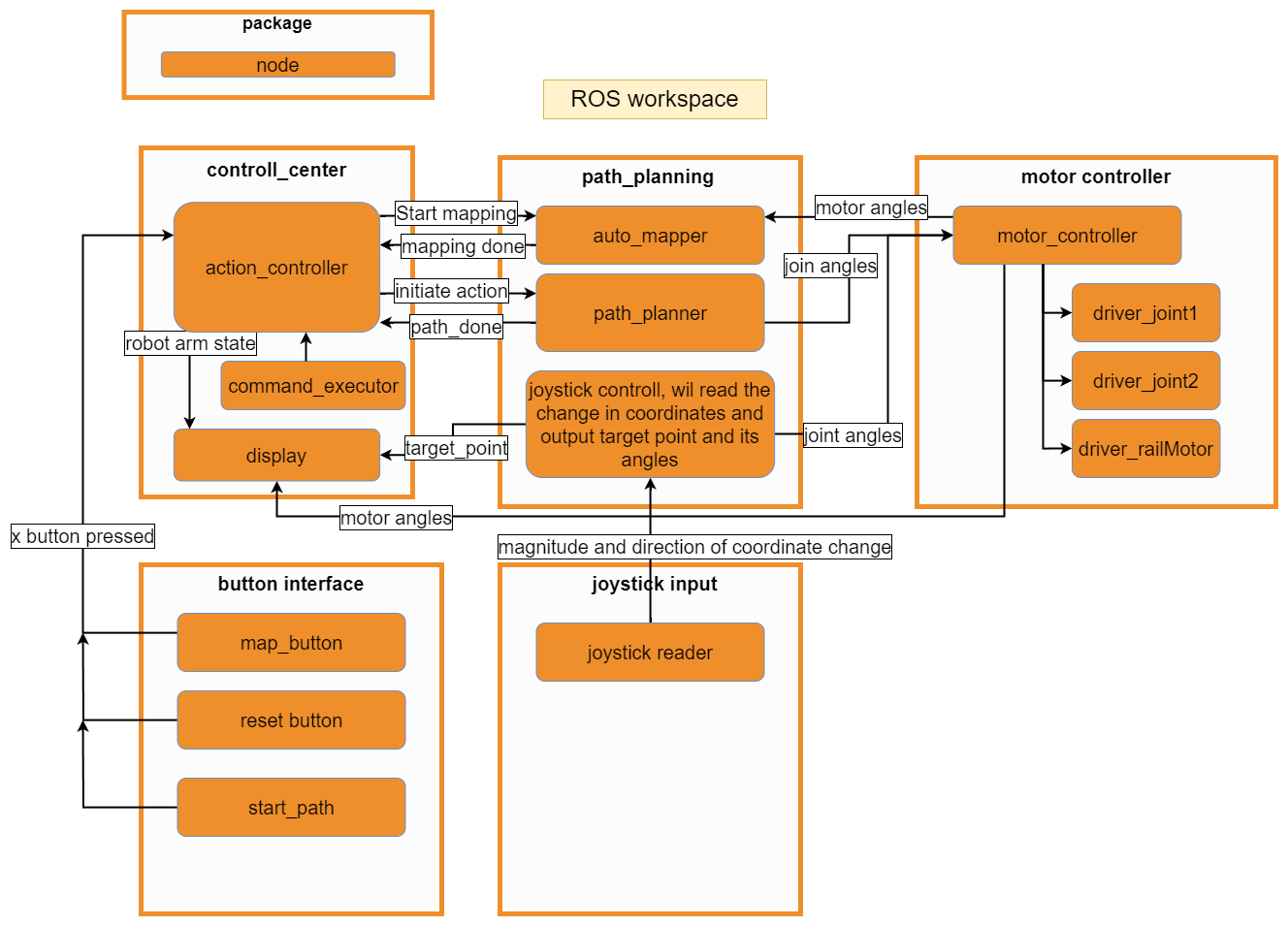
I utviklingen av vårt prosjekt, stod vi ovenfor en viktig beslutning – å velge et konsept for vårt bachelorprosjekt som ville møte de spesifikke behovene til vår oppgave. Vår reise begynte med en grundig evaluering av flere potensielle robotkonsepter, inkludert kartesiske roboter, gantry-roboter, SCARA-roboter, sylindriske roboter, polar/sfæriske roboter, kollaborative roboter, Delta-roboter, Duo-pod og artikulerte roboter. Hvert konsept ble vurdert basert på flere faktorer som effektivitet, kompleksitet og tilpasningsevne til prosjektets krav. Etter diskusjon endte vi med tre konsepter som vi skulle gtrundigere evaluere opp mot hverandre ved hjelp av Pugh-matriser.
Dette tillot oss å gjøre ett velinformert og objektivt valg ved sammenligne alternativene side ved side mot et sett av definerte kriterier. Viktigheten av disse kriteriene ble veid sammen med vår eksterne veileder hos Tronrud Engineering, noe som ga oss verdifull innsikt fra industrien og sikret at konspetevalueringen var i tråd med praktiske og tekniske realiteter.
Etter nøye overveielse og evaluering, landet vi på Duo-pod som vårt foretrukne konsept. Dette valget ble støttet av Duo-podens enkelhet og evne til å oppfylle de essensielle kravene for vår applikasjon. Samarbeidet med Tronrud Engineering spilte en kritisk rolle i å veilede oss mot dette valget, ved å få ett eksternt perspektiv på våre vurderingskriterier og hjelpe oss å prioritere hva som var mest relevant for prosjektets suksess.
Valget av Duo-pod markerer et avgjørende skritt i vårt prosjekt, og vi ser frem til de neste fasene av design, utvikling og implementering.
.jpeg)
.jpeg)
.jpeg)
.jpg)
Da er vi ferdig med første pressentasjon! Det er en viktig milepel i bachelor oppgaven, og markerer at vi er ferdig med å definere scopet av oppgaven, kartlegge veien videre og at vi generelt er i gang!. Videre skal vi veie opp konsepter som kan løse problemet, vurdere og bestille komponenter, og starte design av den første prototypen!



I starten av prosjektet var vi på besøk hos Tronrud, vår oppdragsgiver. Dette var en lærerrik opplevelse hvor vi fikk bedre forståelse av oppgaven og fikk se maskinen der vår løsning skal implementeres.
Copyright 2019 All Right Reserved By Free html Templates