Project description
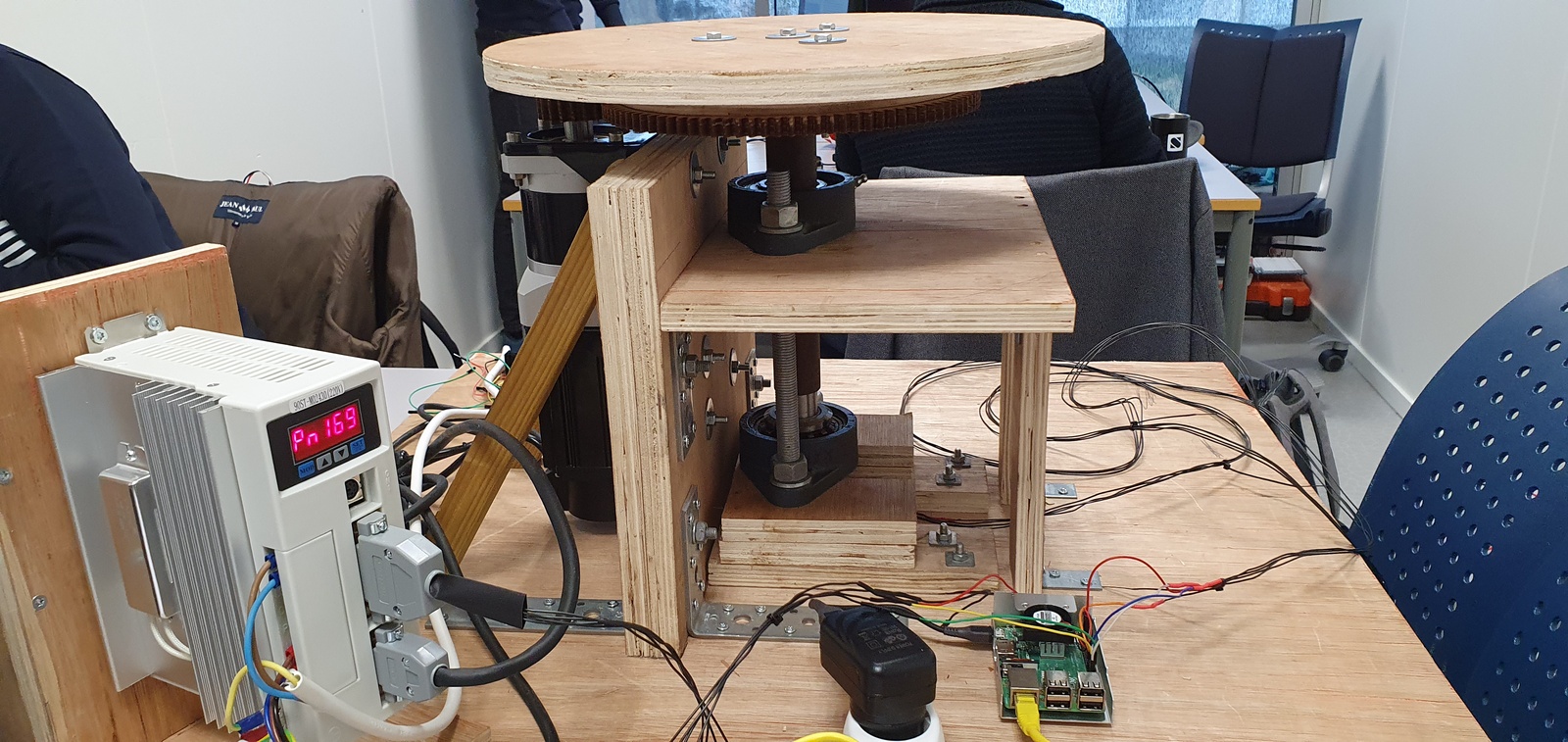
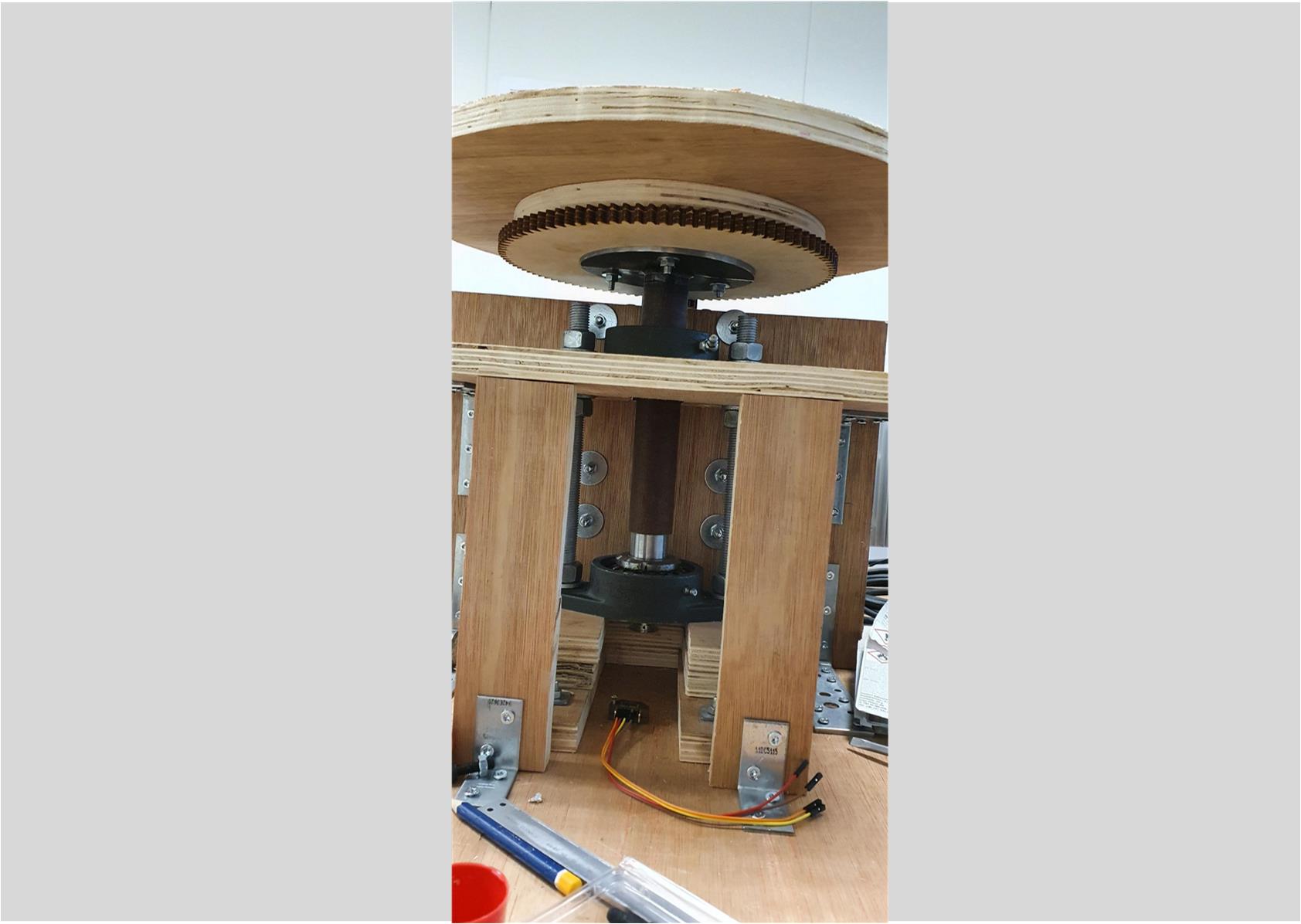
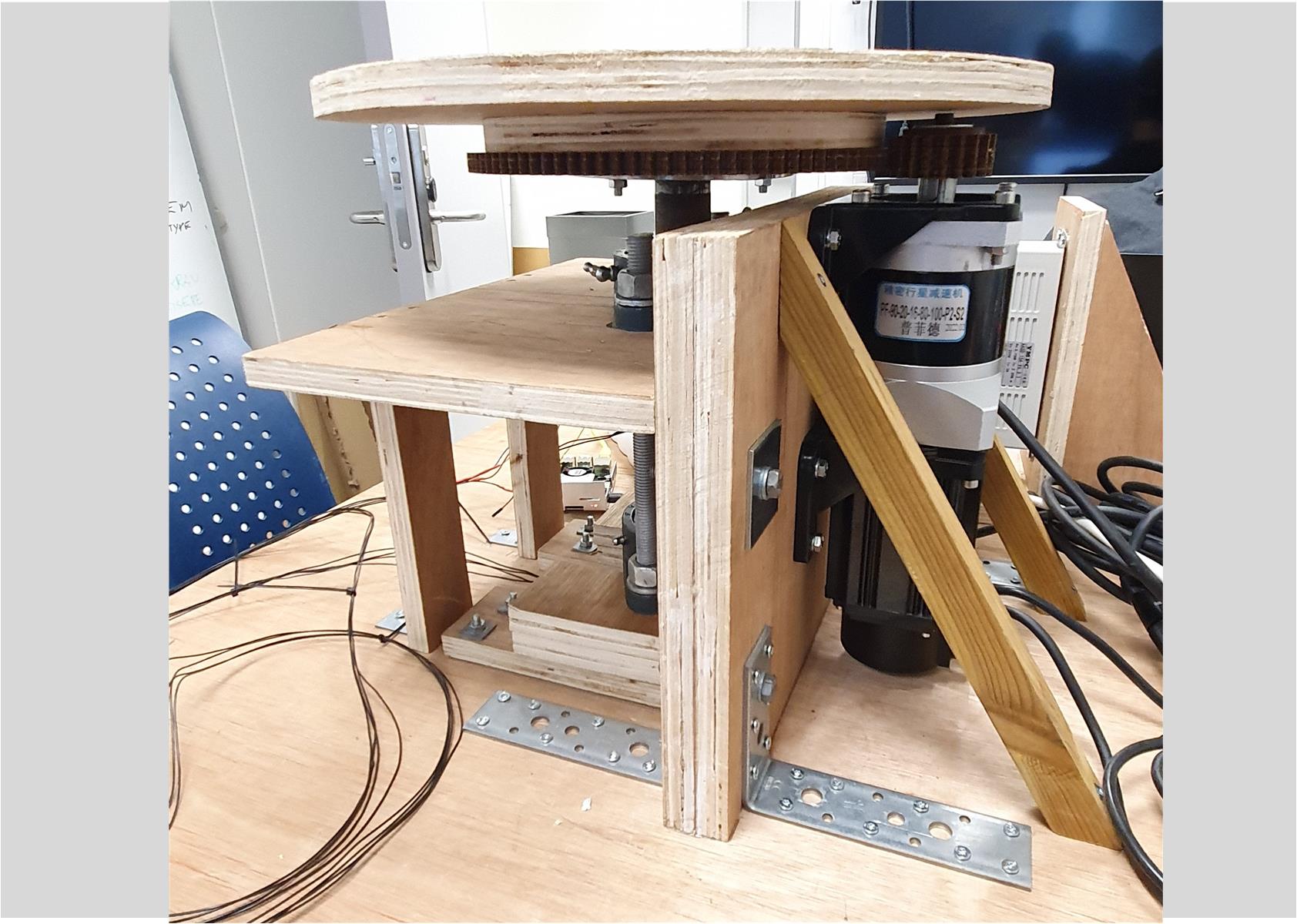
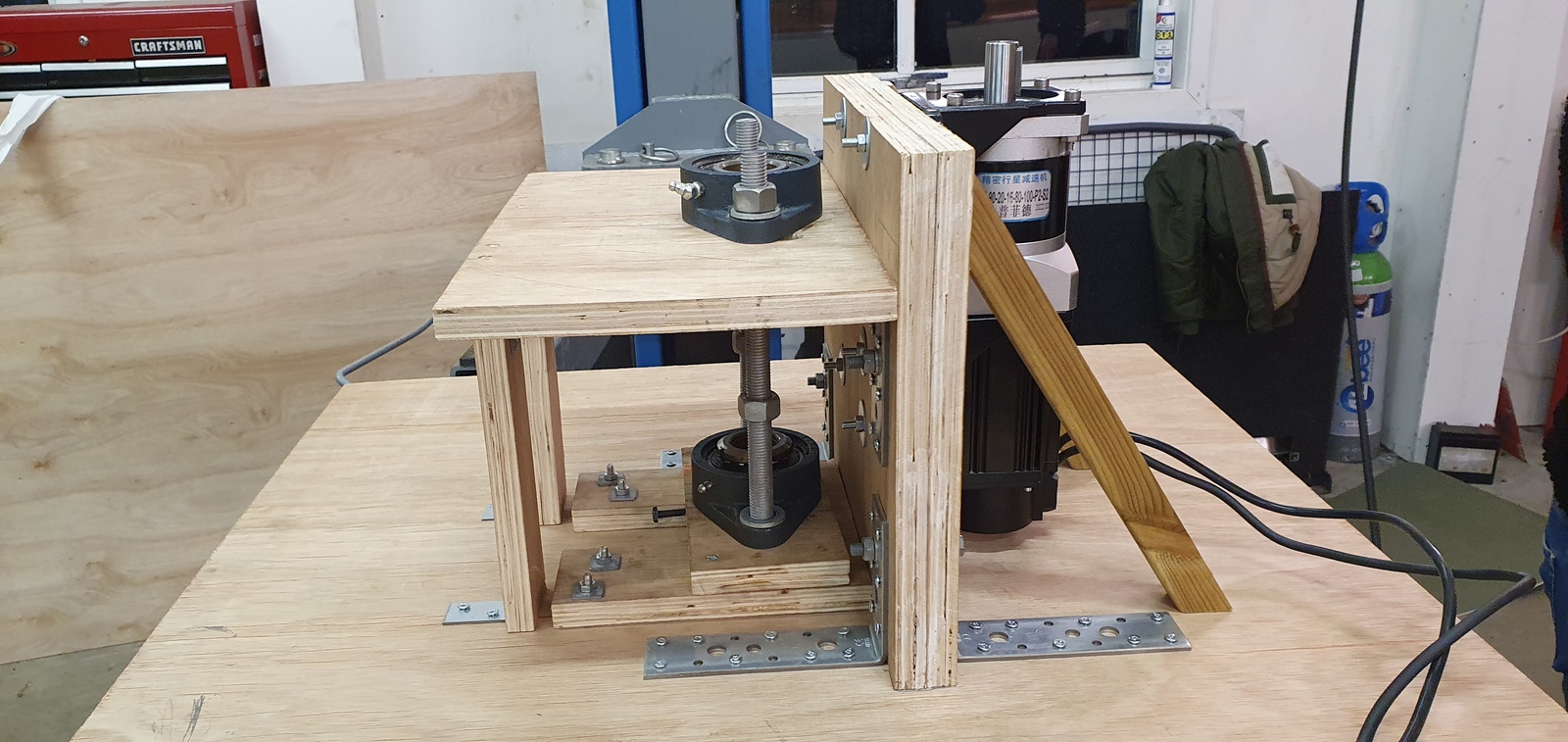
The Orbital Motion Simulator (OMS) was designed mechanically by a previous Bachelor group in 2016. The current project is to integrate the electronics in terms of motor, sensors and controller, and design a control system to operate the OMS. A PID-controller is implemented as a digital controller that regulates the OMS position based on a position sensor located on the main axis. Further, a Graphical User Interface (GUI) and communication channel are made such that the operator can easily command the motion of the OMS and review the data.
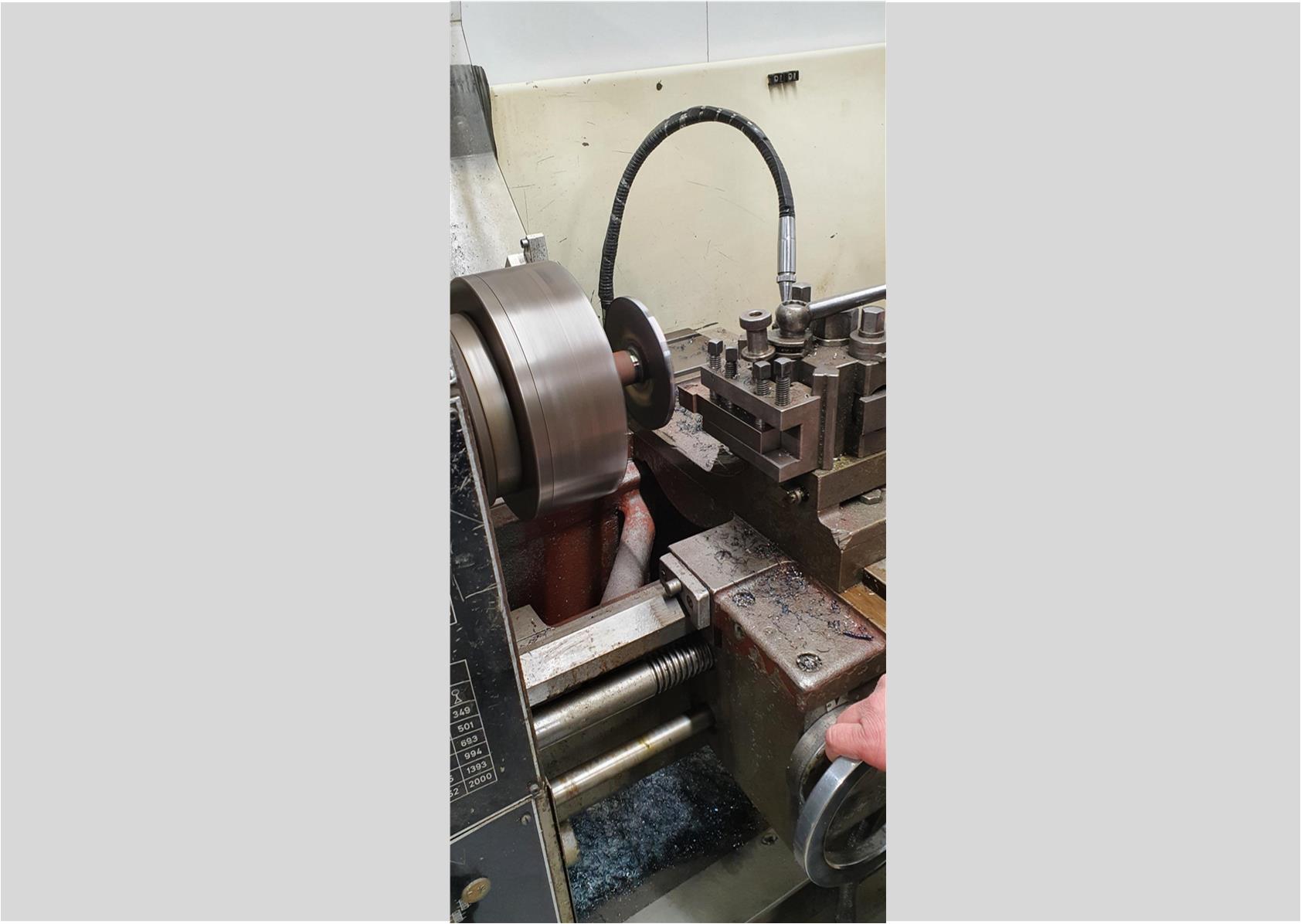
The design process includes dimensioning the hardware and familiarizing ourselves with the chosen products. What type of protocols do the sensors use? How is a servo motor working
together with a servo drive? These questions and many more have been answered even though any
of the group members had direct experience in the field. The project has been educational and challenging, and resulted in a complete design proposed for KDA.
Primary tasks
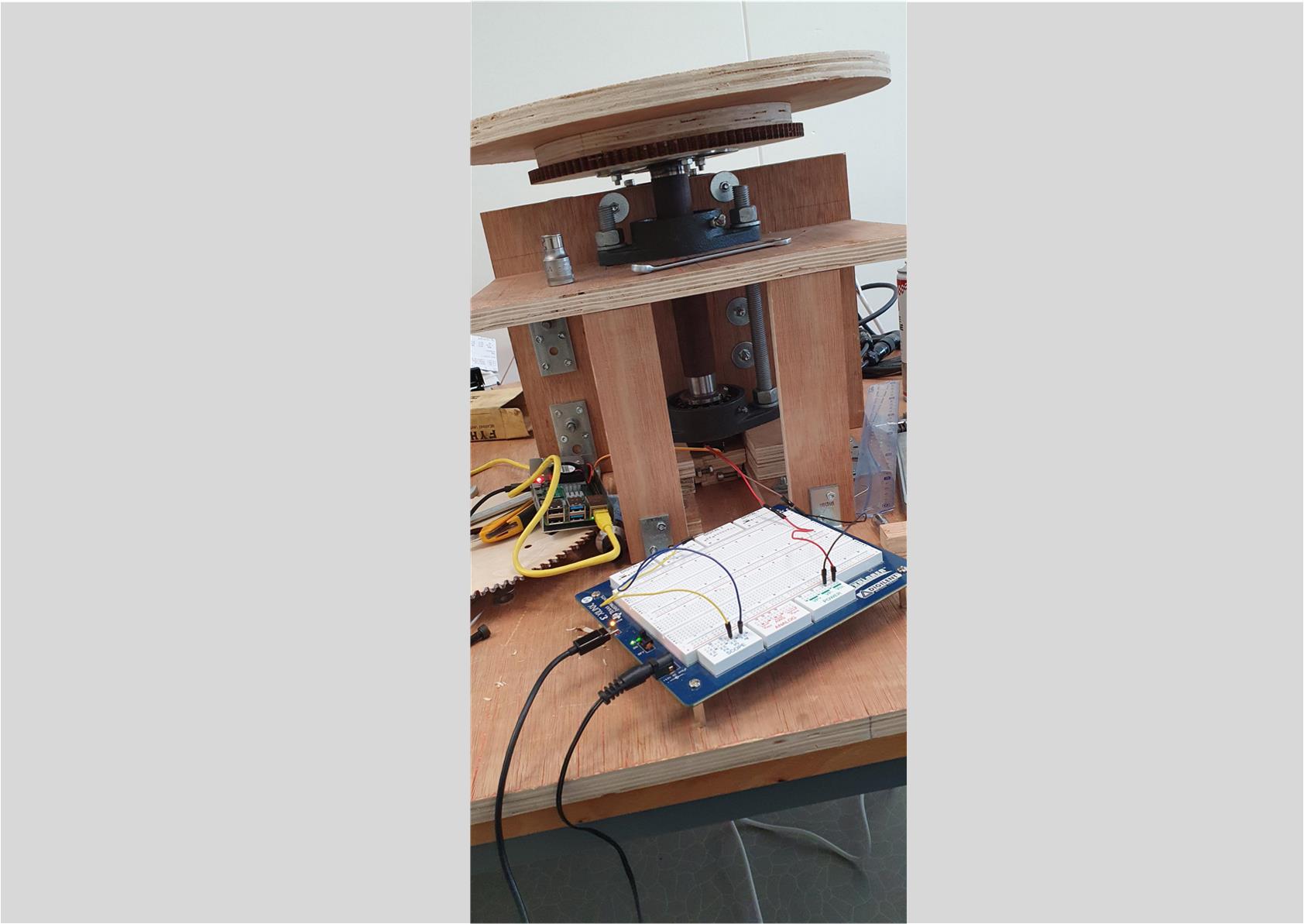
- Design and implementation of control system / algorithm
- Selection of the server motor
- Selecton of the servo drive
- Selection of the actuator sensor
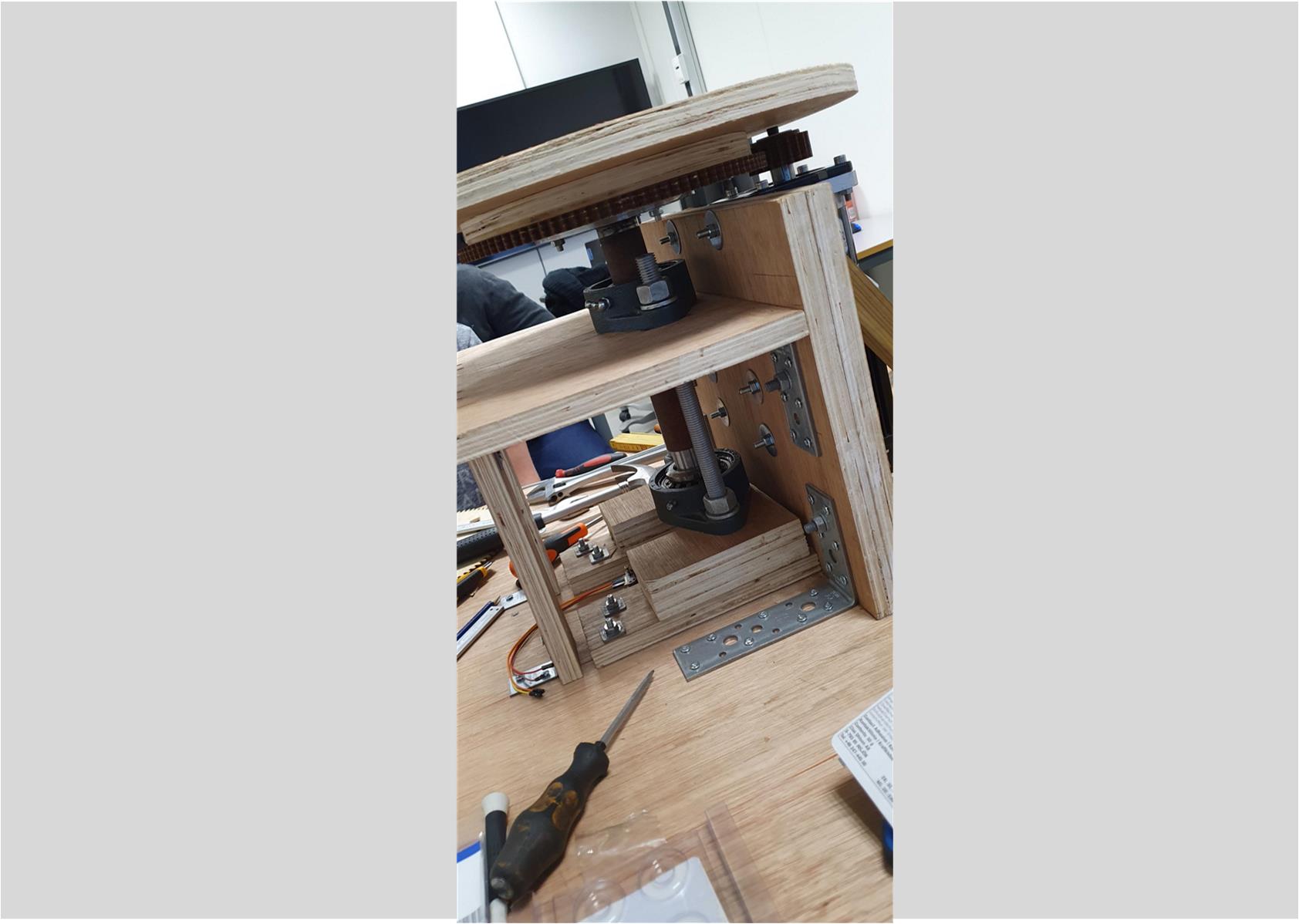
- Selection of the rotary position snesor for main axis of rotation
- Communication between OMS and KDA test station
Secondary tasks
- Design of of graphical user interface
- Selection and implementation of an IMU