
Due to exams next week, the tasks in this sprint will span across this and next week. Focusing on the thesis towards the documentation delivery ahead of the second presentation will be a big priority alongside the technical tasks. Everyone will update on their progress and focus on getting a good structure on the report.
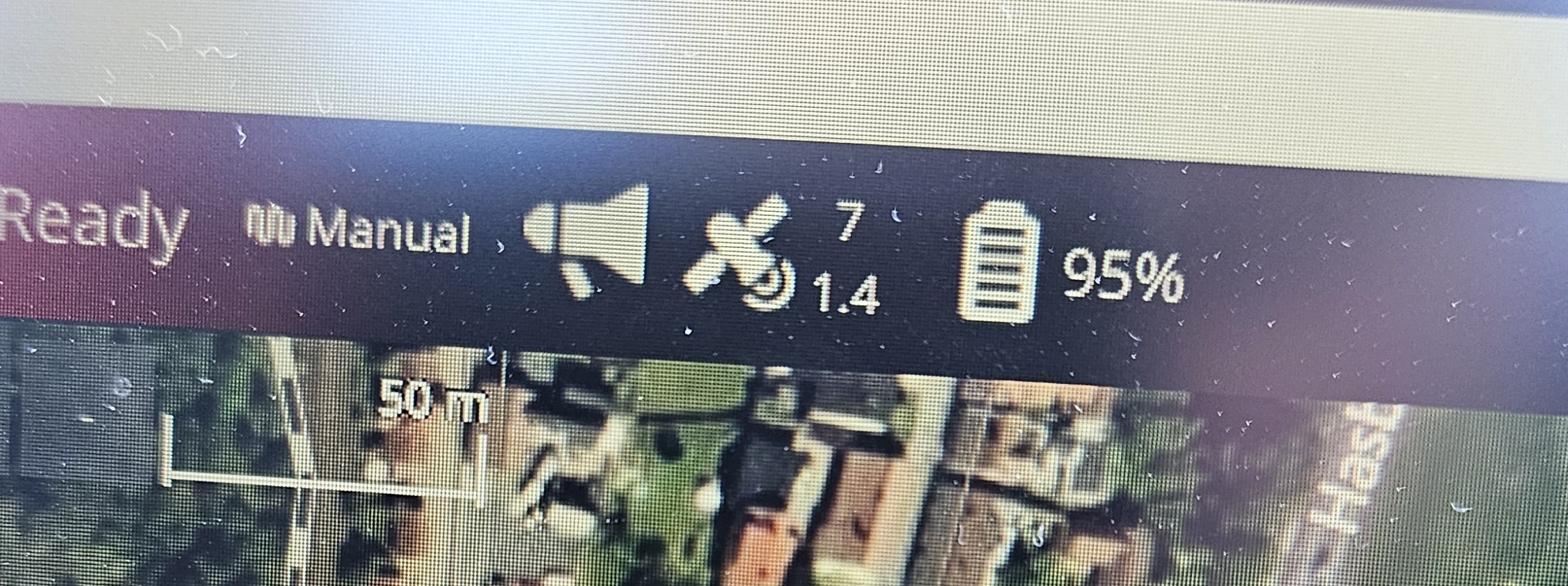
After having a permanent GPS count of zero for the last weeks, we finally got the drone to triangulate with some GPS satelittes. The lack of success last friday did not deter Ruben and Eirik from stepping outside and giving it another try. Ruben decided to try and disconnect the GPS unit and plugging it back in after waiting a while with no results. To start with this achieved nothing, but after Eirik rebooted the drone and ran the commands once more, triangulation was achieved. It peaked at 7 satelittes (according to Modal AI, 6-8 is preferable range), with a relatively high accuracy of 1.4% HDOP (Horizontal Dilution of Precision) and VDOP (Vertical Dilution of Precision).
Sprint Summary:
| Name | Task | Comments |
|---|---|---|
| Kasper | Write scripts to start/stop motors from Pi and test them. Also send information back to QGC. | |
| Eirik | Look into sending information from the drone to QGC. | |
| Kristian T | Continue with packet receiving in QGC | |
| Kristian M | Continue on the BMS schematic | |
| Ruben |
|
|
| Ulrik | Continue on a prototype mockup. |