This week saw continued development across system integration, interface functionality, and concept selection. The Raspberry Pi was successfully connected to QGroundControl (QGC), enabling remote command execution, and the functional analysis diagram was completed. QGC interface work progressed with new UI buttons added and capable of sending UDP packets, though receiving functionality is still under development. GPS connectivity issues persisted, prompting direct outreach to ModalAI for support; progress in this area is on hold pending a response, with potential fallback solutions being considered. Hardware development advanced with the selection of a dispenser concept and completion of the opening mechanism, supported by a forthcoming PUGH matrix for justification. Charging solutions and BMS schematics moved forward, with one concept selected and ongoing efforts to finalize simulations and components. Development and planning documentation were also updated in parallel with technical work.
Sprint Summary
| Name | Task | Comments |
|---|---|---|
| Kasper |
|
|
| Eirik |
|
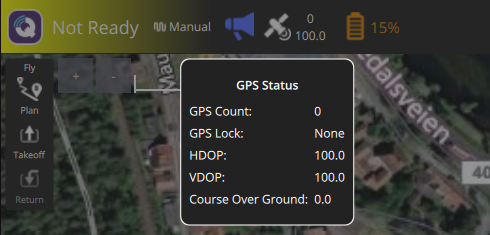
Due to problems with getting the GPS to triangulate with satellites, I have contacted Modal AI directly to get assistance. This task has been put on pause until I get a response, so that no more time and resources is going to waste on nothing. If we do not get a response within a reasonable scope, we need to start thinking about backup ideas. |
| Kristian T |
|
Buttons are implemented into QGC and can send UDP packets to Pi, but not yet receive. |
| Kristian M |
|
|
| Ruben |
|
|
| Ulrik |
|
|